











NASA is investing in new technology concepts that include meteoroid impact detection, space telescope swarms, and small orbital debris mapping technologies that may one day be used for future space exploration missions.
The agency selected 25 early-stage technology proposals that have the potential to transform future human and robotic exploration missions, introduce new exploration capabilities, and significantly improve current approaches to building and operating aerospace systems.
The 2018 NASA Innovative Advanced Concepts (NIAC) Phase I concepts cover a wide range of innovations selected for their potential to revolutionize future space exploration.
Phase I awards are valued at approximately $125,000, over nine months, to support initial definition and analysis of their concepts.
If these basic feasibility studies are successful, awardees can apply for Phase II awards.

“The NIAC program gives NASA the opportunity to explore visionary ideas that could transform future NASA missions by creating radically better or entirely new concepts while engaging America’s innovators and entrepreneurs as partners in the journey,” explained Jim Reuter, acting associate administrator of NASA’s Space Technology Mission Directorate (STMD).
“The concepts can then be evaluated for potential inclusion into our early stage technology portfolio.”
The selected 2018 Phase I proposals are:
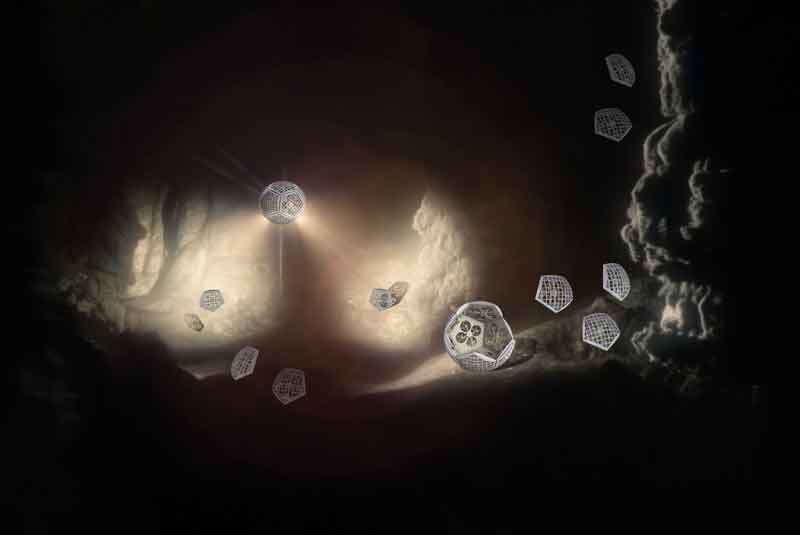
Shapeshifters from Science Fiction to Science Fact: Globetrotting from Titan’s Rugged Cliffs to its Deep Seafloors
Aliakbar Aghamohammadi, NASA’s Jet Propulsion Laboratory (JPL), Pasadena, California
(Image courtesy of Ali Agha, Jose Mendez, JPL)
- Shapeshifter is a novel system concept for all-access and cross-domain mobility on bodies with atmospheres.
- The proposed robotic platform is capable of mobility across domains including flying in the atmosphere, rolling on a smooth surface, navigating subsurface voids (ex. caves), floating on a lake surface and propelling under an ocean.
- Shapeshifter is a flying amphibious robot (FAR), comprised of smaller robotic units (each referred to as a cobot) which combine to shapeshift into different mobility modes.
- Each cobot is extremely simple with minimal design consisting of a few propellers as actuators.
- Shapeshifter can morph into a ball that rolls on the surface, a flight array that can fly & hover above-surface and move in subsurface voids, and a torpedo-like structure to swim under-liquid efficiently, among other mobility modes.
- In addition to all-access, cross-domain mobility, shapeshifter morphs into other functional systems to carry out a diverse set of tasks.
- Examples include transporting large and heavy objects, traversing long distances with minimal power consumption, creating communication networks to communicate to surface from deep hard-to-access areas.
Biobot: Innovative Offloading of Astronauts for More Effective Exploration
David Akin, University of Maryland, College Park

- No parameter in the design of spacesuits for planetary exploration is more important than “weight on the back”: the weight of the suit system which must be supported by the wearer under the gravity of the Moon or Mars.
- The added weight of the spacesuit garment andportable life support system (PLSS) drives the required exertion level of the wearer, and ultimately sets limitations on EVA duration, distance traveled on foot, and productivity of the exploration mission.
- It is clear that planetary surface exploration activities would be greatly improved if the astronauts did not have to carry a PLSS to maintain life support functions.
- At the same time, additional restrictions on crew mobility, limits of access, and operational capabilities would be unacceptable.
- The concept for this NIAC proposal is to accomplish these two seemingly conflicting requirements through the application of advanced robotic systems to deal with biological requirements (i.e., life support) for the astronauts: the ‘BioBot’.
- The design reference scenario for this concept is that astronauts involved in future lunar or Mars exploration will be on the surface for weeks or months rather than days, and will be involved in regular EVA operations.
- It is not unreasonable to think of geologists spending several days in EVA exploration each week over a prolonged mission duration, with far more ambitious operational objectives than were typical of Apollo.
- In this scenario, each astronaut will be accompanied by a ‘BioBot’, which will transport their life support system and consumables, an extended umbilical and umbilical reel, and robotic systems capable of controlling the position and motion of the umbilical.
- The astronaut will be connected to the robot via the umbilical, carrying only a small emergency openloop life support system similar to those contained in every PLSS.
- The robotic mobility base will be designed to be capable of traveling anywhere the astronaut can walk, and will also be useful as a transport for the EVA tools, science instrumentation, and collected samples, and potentially carrying the astronaut on traverses as well.
- Such as system will also be a significant enhancement to public engagement in these future exploration missions, as the robotic vehicles can provide high-resolution cameras and high-bandwidth communications gear to provide high-definition video coverage of each crew throughout each EVA sortie.
- There are also architecture-level benefits to this concept.
- For example, in the drive to reduce suit weight to the absolute minimum due to the load of the PLSS, design elements which would enhance suit mobility (such as rotary bearings) are frequently deleted, resulting in a lighter but less flexible suit enclosure.
- By offloading the life support system electrical power, and consumables, the relatively meager increase in garment mass to incorporate these mobility features would be easily accommodated, resulting in not only a lighter, but also more flexible spacesuit system with an overall center of gravity very close to that of the wearer’s body.
- Since the PLSS weight restrictions would be negated by placing the system and its consumables on an accompanying robot, the overall EVA system could easily adapt to longer sorties, higher capacity astronaut cooling systems, or higher levels of redundancy to enhance crew safety and minimize the possibility of a loss-of-crew event.
- When no longer constrained to fit within the mass and volume constraints of a spacesuit backpack, portable life support designers can consider technology alternatives better suited to extended exploration, such as radiators for cooling, solar panels to extend electrical power, or regenerable CO2 scrubbing systems
Lofted Environmental and Atmospheric Venus Sensors (LEAVES)
Jeffrey Balcerski, Ohio Aerospace Institute, Cleveland

- The LEAVES (Lofted Environmental and Atmospheric VEnus Sensors) concept is an ultra-lightweight, passively-lofted, and inexpensive atmospheric sensor package that is designed to withstand the harsh Venus atmosphere, but which also provides a generic platform for in situ sampling of any planetary body with a prominent atmosphere.
- This architecture is intended to provide high spatial and temporal resolution during atmospheric sampling by operating in parallel, rather than a more traditional serial approach.
- By removing the need for active propulsion or guidance (as with aircraft) or inflation media and buoyancy control (as with balloons), the LEAVES units require very little infrastructure.
- Mission science objectives are achieved through the deployment of many identical units over a wide geographic area, cost savings are realized through reusable production lines and commercially-available components, and operational resilience is increased through parallel operations.
- Moreover, this architecture is exceptionally well suited as a secondary payload as it requires few control resources from ground stations, poses very little risk to a primary payload, and returns data only for the duration of their slow descent through the atmosphere.
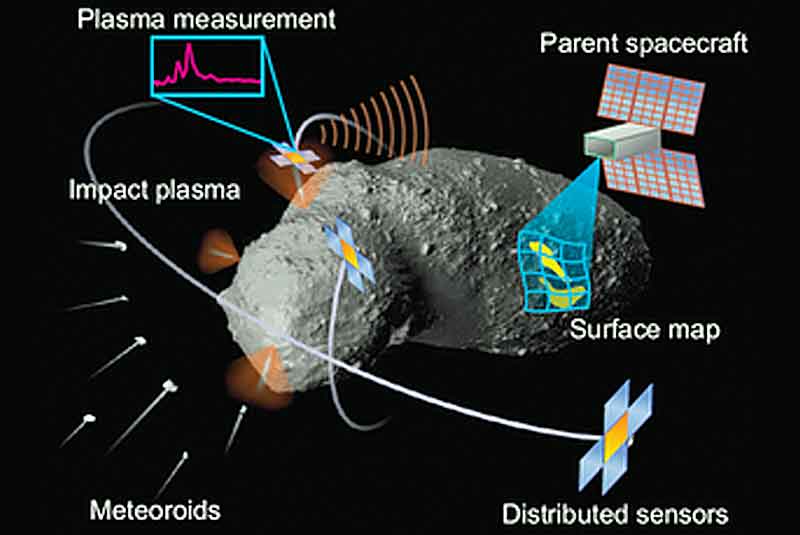
Meteoroid Impact Detection for Exploration of Asteroids (MIDEA)
Sigrid Close, Stanford University, California
- Asteroids contain a wealth of resources including water and precious metals that can be extracted.
- These resources could be applied to in-space manufacture of products that depend less on material launched from Earth’s surface.
- Within the next few decades, we will likely have the technological capability to retrieve asteroids and bring them to a processing facility near Earth, or to send a processing facility to the asteroid to extract the resources on site.
- However, a substantial investment is required to accomplish either task.
- The Meteoroid Impact Detection for Exploration of Asteroids (MIDEA) concept leverages the natural space environment to provide a source of meteoroid impacts, resulting in erosion of the material on the asteroid surface.
- The material excavated by a meteoroid impact includes solid and molten ejecta, but some of this material is vaporized and ionized, forming a plasma that expands into the environment around the asteroid.
- This plasma expands outward into space and provides information on the composition of the asteroid surface.
- MIDEA enables a mission to a 100 to 1000 m near-Earth asteroid (NEA) using a parent spacecraft in the 10 to 50 kg range, carrying a constellation of ten or fewer free-flying sensors that are each approximately 100 g in mass.
- At this low mass scale, many such missions could be launched in parallel to different asteroids, performing a broad survey of potential targets prior to a dedicated in situ resource utilization (ISRU) mission.
On-Orbit, Collision-Free Mapping of Small Orbital Debris
Christine Hartzell, University of Maryland, College Park
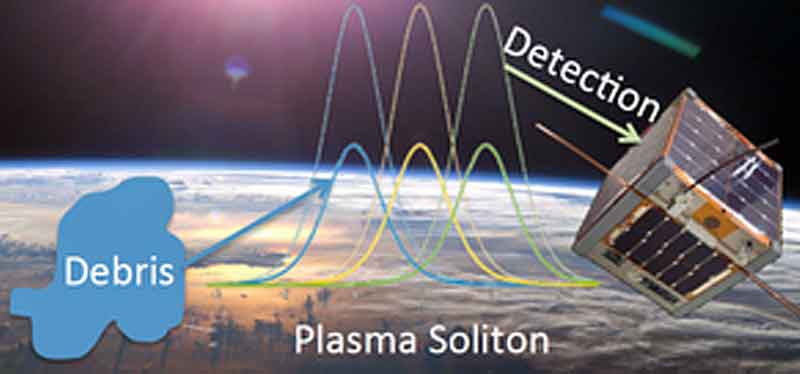
- We propose to evaluate the feasibility of mapping small (micron to sub-cm scale) orbital debris in LEO using a fleet of cubesats equipped with sensors to detect the plasma signature of the debris.
- Small debris is currently undetectable and poses a hazard to spacecraft.
- Recently discovered precursor plasma solitons excited by fast-moving charged debris in a plasma could enable mapping of small orbital debris by simple sensors on a fleet of cubesats.
- The proposed technology would revolutionize our interaction with small orbital debris by enabling spacecraft placement in less hazardous orbits as well as quantitative evaluation of mitigation efforts.
- Additionally, the proposed technology may be applicable to dust detection efforts near other planetary targets.
- Preliminary calculations indicate that small debris in orbits from 400-1600km altitude could be mapped in less than 1 year using fewer than 100 cubesats.
- We propose to assess the feasibility of this concept by modeling the precursor solitons produced by sample debris objects of varying velocity and charge, as well as the long-distance propagation of solitons through spatially varying plasma environments.
- Additionally, we will develop preliminary designs of the cubesat fleet required to map small debris by detecting plasma solitons.
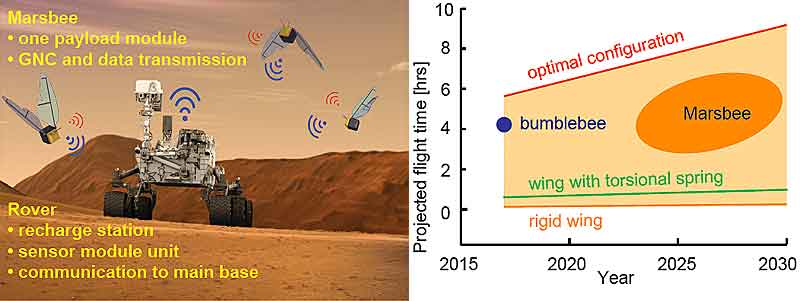
Marsbee – Swarm of Flapping Wing Flyers for Enhanced Mars Exploration
Chang-kwon Kang, University of Alabama, Huntsville
- The objective of the proposed work is to increase the set of possible exploration and science missions on Mars by investigating the feasibility of flapping wing aerospace architectures in a Martian environment.
- The proposed architecture consists of a Mars rover that serves as a mobile base and a swarm of Marsbees.
- Marsbees are robotic flapping wing flyers of a bumblebee size with cicada sized wings.
- The Marsbees are integrated with sensors and wireless communication devices.
- The mobile base can act as a recharging station and main communication center.
- The swarm of Marsbee can significantly enhance the Mars exploration mission with the following benefits:
- i) Facilitating reconfigurable sensor networks
- ii) Creation of resilient systems
- iii) Sample or data collection using single or collaborative Marsbees
- Key technical innovation includes the use of insect-like compliant wings to enhance aerodynamics and a low power design.
- High lift coefficients will be achieved by properly achieving dynamic similarity between the bioinspired insect flight regime and the Mars environment.
- Our preliminary numerical results suggest that a bumblebee with a cicada wing can generate sufficient lift to hover in the Martian atmosphere.
- Moreover, the power required by the Marsbee will be substantially reduced by utilizing compliant wing structures and an innovative energy harvesting mechanism.
- Because of the ultra-low Martian density, the power is dominated by the inertial power.
- A torsional spring mounted at the wing root to temporarily store otherwise wasted energy and reduce the overall inertial power at resonance.
- Whereas rotary wing concepts are much more mature in both design and control, these two innovations are uniquely suited to bioinspired flapping vehicles and provide flying near the Martian terrain as a viable means of mobility.
- From a systems engineering perspective, the Marsbee offers many benefits over traditional aerospace systems.
- The smaller volume, designed for the interplanetary spacecraft payload configuration, provides much more flexibility.
- Also, the Marsbee inherently offers more robustness to individual system failures.
- Because of its relatively small size and the small volume of airspace needed to test the system, it can be validated in a variety of accessible testing facilities.
- The proposed work combines expertise and talent from the US and Japan in a multidisciplinary program to address fundamental aspects of flapping wing flight in Martian atmosphere.
- The University of Alabama in Huntsville team will numerically model, analyze, and optimize a flapping flyer for Martian atmospheric conditions.
- The Japanese team will develop and test a micro flapping robot, uniquely designed and constructed for the low-density atmosphere on Mars.
- The hummingbird Micro-Air Vehicle (MAV), developed by the Japanese team is one of only a few robotic flappers in the world that can fly on Earth.
- The objective of Phase I is to determine the wing design, motion, and weight that can hover with optimal power in the Mars atmospheric condition using a high-fidelity numerical model and to assess the hummingbird MAV in the Mars conditions.
- The aerodynamic performance of the hummingbird MAV will be assessed in a vacuum chamber with the air density reduced to the Mars density.
- Systems engineering optimization will be performed as well for the entire mission.
- The maneuverability, wind gust rejection, take-off/landing, power implications, remote sensing, and mission optimization will be addressed in Phase II.
Rotary Motion Extended Array Synthesis (R-MXAS)
John Kendra, Leidos, Inc., Reston, Virginia
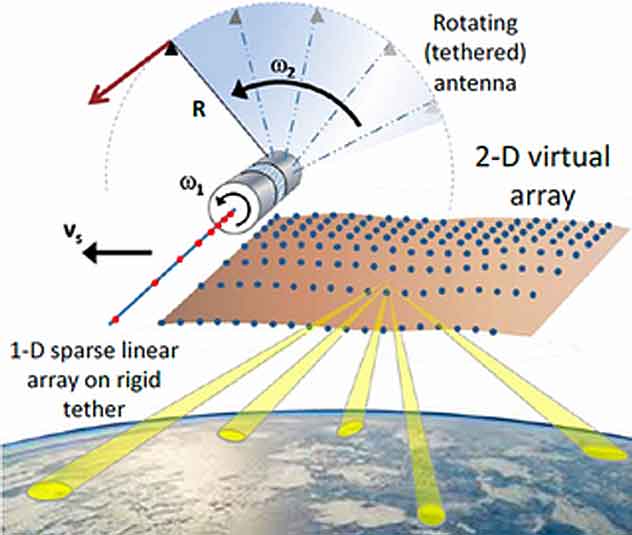
A large virtual RF aperture is established via a rotating tether affording capability leaps in space-based imaging 1-D sparse real array on a rigid tether and a tethered rotating antenna element continuously create a very large 2-D virtual array.
Ultimate array size is limited only by feasibility constraints on length of rigid tether.
Potential mission applications include:
- Persistent (GEO-based) RF earth imaging (for soil moisture, ocean salinity, surface temp., sea surface wind, etc.)
- Mapping coronal mass ejections (CMEs) from a solar polar orbit
- Any RF remote sensing applications requiring an extra-large aperture
Major tasks
- Concept Validation and Performance Modeling
- Alternative Approaches Evaluation
- Mission Analysis for Technology Application
PROCSIMA: Diffractionless Beamed Propulsion for Breakthrough Interstellar Missions
Chris Limbach, Texas A&M Engineering Experiment Station, College Station
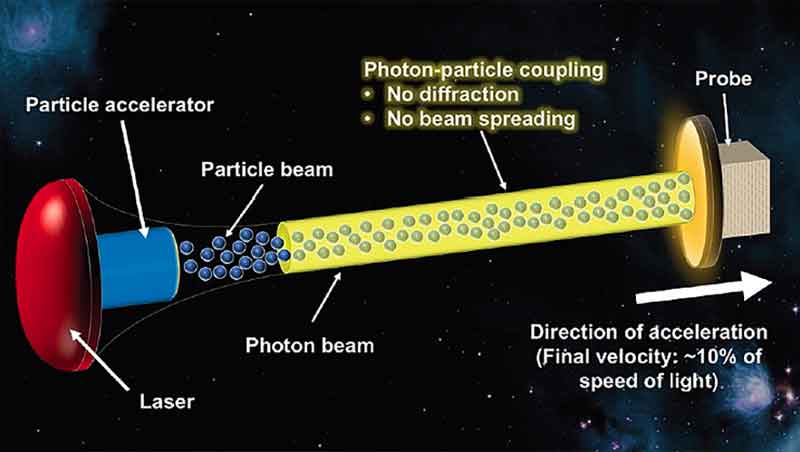
- We propose a new and innovative beamed propulsion architecture that enables an interstellar mission to Proxima Centauri with a 42-year cruise duration at 10% the speed of light.
- This architecture dramatically increases the distance over which the spacecraft is accelerated (compared with laser propulsion) while simultaneously reducing the beam size at the transmitter and probe from 10s of kilometers to less than 10 meters.
- These advantages translate into increased velocity change (delta-V) and payload mass compared with laser propulsion alone.
- While primarily geared toward interstellar missions, our propulsion architecture also enables rapid travel to destinations such as Oort cloud objects and the solar gravitational lens at 500 AU.
- The key innovation of our propulsion concept is the application of a combined neutral particle beam and laser beam in such a way that neither spreads or diffracts as the beam propagates.
- The elimination of both diffraction and thermal spreading is achieved by tailoring the mutual interaction of the laser and particle beams so that
- (1) refractive index variations produced by the particle beam generate a waveguide effect (thereby eliminating laser diffraction) and
- (2) the particle beam is trapped in regions of high electric field strength near the center of the laser beam
- By exploiting these phenomena simultaneously, we can produce a combined beam that propagates with a constant spatial profile, also known as a soliton.
- We have thus named the proposed architecture PROCSIMA: Photon-paRticle Optically Coupled Soliton Interstellar Mission Accelerator.
- Compared with a diffracting laser beam, the PROCSIMA architecture increases the probe acceleration distance by a factor of ~10,000, enabling a payload capability of 1 kg for the 42-year mission to Proxima Centauri.
- The PROCSIMA architecture leverages recent technological advancements in both high-energy laser systems and high-energy neutral particle beams.
- The former has been investigated extensively by Lubin in the context of conventional laser propulsion, and we assume a similar 50 GW high-energy laser capability for PROCSIMA.
- Neutral beam technology is also under development, primarily by the nuclear fusion community, for diagnostics and heating of magnetically confined fusion plasmas.
- By combining known physics with emerging laser and neutral beam technologies, the PROCSIMA architecture creates a breakthrough payload capability for relativistic interstellar missions.
SPARROW: Steam Propelled Autonomous Retrieval Robot for Ocean Worlds
Gareth Meirion-Griffith, JPL
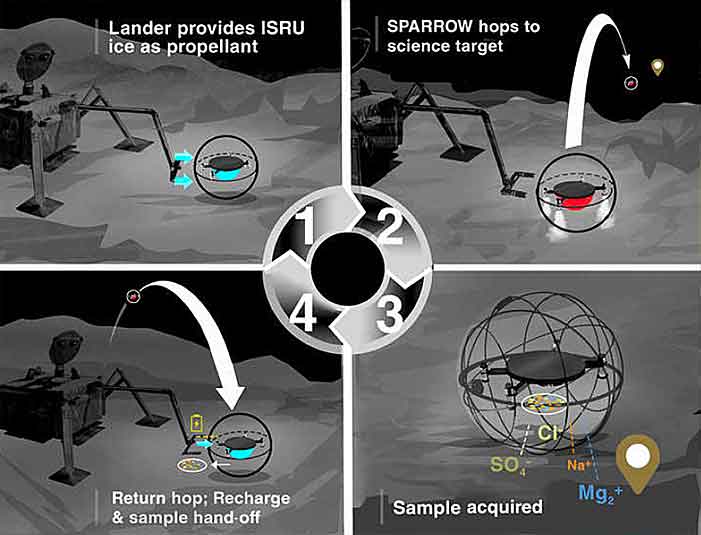
- We propose to perform a novel investigation into the ability of a propulsively hopping robot to reach targets of high science value on the icy, rugged terrains of Ocean Worlds.
- The employment of a multi-hop architecture allows for the rapid traverse of great distances, enabling a single mission to reach multiple geologic units within a timespan conducive to system survival in a harsh radiation environment.
- We further propose that the use of a propulsive hopping technique obviates the need for terrain topographic and strength assumptions and allows for complete terrain agnosticism; a key strength of this concept.
- The objectives detailed in this proposal will be accomplished through the interdisciplinary collaboration of world leading robotics, propulsion, sample acquisition engineers, and planetary scientists from JPL, Purdue University, and Honeybee Robotics.
BALLET: Balloon Locomotion for Extreme Terrain
Hari Nayar, JPL
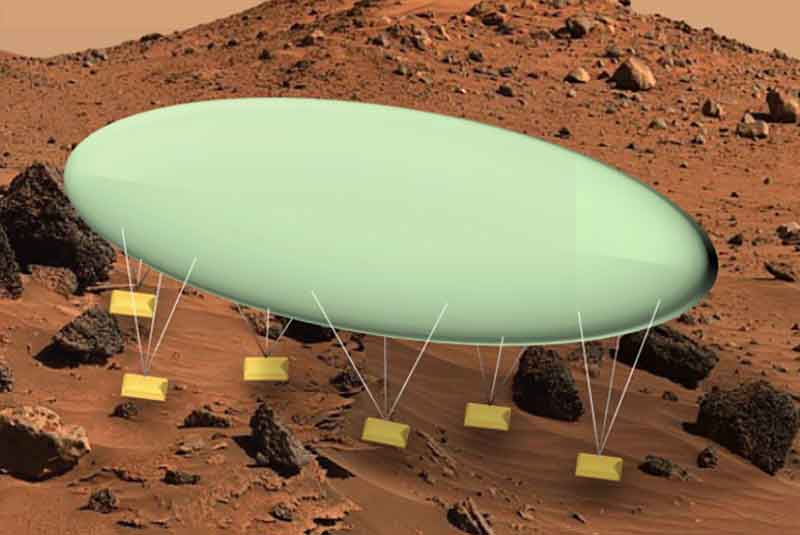
- We propose a balloon platform with 6 suspended modules each containing a payload that also serves as a foot for locomotion.
- Each foot is suspended by 3 cables to the balloon to control the placement of the foot on the ground.
- Only 1 foot/payload is raised at a time to move to a new location on the surface while the remaining feet keep the balloon anchored to the surface.
- The balloon buoyancy is only needed to lift 1 foot at a time.
- Feet are moved in sequence to locomote over the surface.
- The platform is highly stable because its center of gravity is almost at ground level.
- Images from cameras on the balloon are used to map and locate foot placement and for navigation.
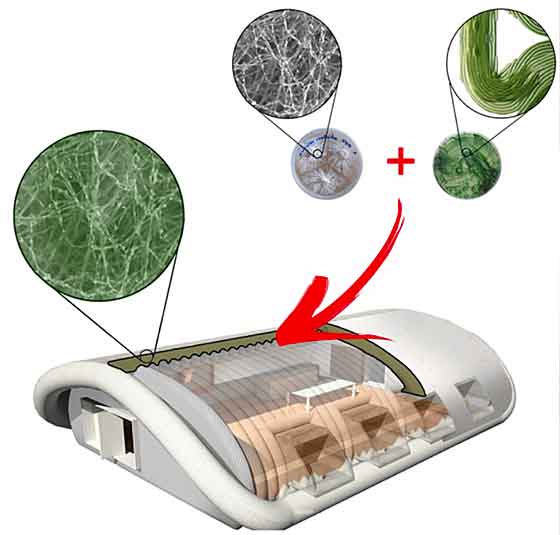
Myco-Architecture off Planet: Growing Surface Structures at Destination
Lynn Rothscild, NASA’s Ames Research Center, Moffett Field, California
- A turtle carries its own habitat. While it is reliable, it costs energy.
- NASA makes the same trade-off when it transports habitats and other structures needed to lunar and planetary surfaces increasing upmass, and affecting other mission goals.
- Imagine a self-pitching habitat made of a light, fibrous material, with excellent mechanical properties.
- The material could be used dry, wet, frozen with water or as part of a self-produced composite which could allow such enhancements as radiation protection and a vapor seal.
- It is self-replicating so the habitat could be extended at a future date, and self-repairing.
- Some form of this material could be used for a habitat at destination, additional buildings, the shell of multiple rovers and furniture.
- The fibrous material is fungal mycelium, the vegetative structure of fungi consisting of branching, thread-like hyphae.
- Mycelial materials, already commercially produced, are known insulators, fire retardant, and do not produce toxic gasses.
- Metrics for these materials show compression strengths superior to dimensional lumber, flexural strength superior to reinforced concrete, and competitive insulation values.
- As mycelia normally excrete enzymes, it should be possible to bioengineer them to secrete other materials on demand such as bioplastics or latex to form a biocomposite.
- Mycelia are more flexible and ductile than regolith alone.
- As a standalone material or in conjunction with agglutinated or sintered regolith, a mycotectural building envelope could significantly reduce the energy required for building because in the presence of food stock and water it would grow itself.
- After the arrival of humans, additional structures could be grown with feedstock of mission-produced organic waste streams.
- Melanin-rich fungi have the ability to absorb radioactivity suggesting that melanized fungal mycelia could provide radiation protection.
- Lead found in the regolith, or other radiation blocking materials such as water could accumulate in the mycelia providing additional radiation protection.
- When protected, the mycomaterials can have a long life, but at the end of its life cycle the material could be become fertilizer for mission farming.
- Our concept fits within the Mars DRA 5.0 ‘commuter’ scenario, with the major difference being that the habitats and the shells of the rovers would be built at destination.
- On Earth, a flexible plastic shell produced to the final habitat dimensions would be seeded with mycelia and dried feedstock and the outside sterilized.
- At destination, the shell could be configured to its final inner dimensions with struts.
- The mycelial and feedstock material would be moistened with Martian or terrestrial water depending on mass trade-offs, and heated, initiating fungal (and living feedstock) growth.
- Mycelial growth will cease when feedstock is consumed, heat withdrawn or the mycelia heat-killed.
- If additions or repairs to the structures are needed, water, heat and feedstock can be added to reactivate growth of the dormant fungi.
- The proposed work focuses on filling select key technical knowledge gaps such as the temperature range of mycelial growth, radiation protection, potential for algal feedstock and enmeshed biosensors, mass of inputs and finished product, and material properties of the materials.
- The potential for enhancing structural and sensing capabilities by the incorporation of the bacterium Bacillus subtilus, is novel.
- Architectural design concepts based on this vision will be examined for use in a mission context including mass trade-offs, and temperature inputs, as well as suggesting new terrestrial routes to infusion where rapidly built, lightweight structures are desired.
- If successful in developing a biocomposite material that can grow itself, NASA will have a radically new, cheaper, faster lighter material for designing habitats for extended duration lunar missions, Mars missions, and mobile habitats as well as furniture and other structures.
Modular Active Self-Assembling Space Telescope Swarms
Dmitry Savransky, Cornell University, Ithaca, New York
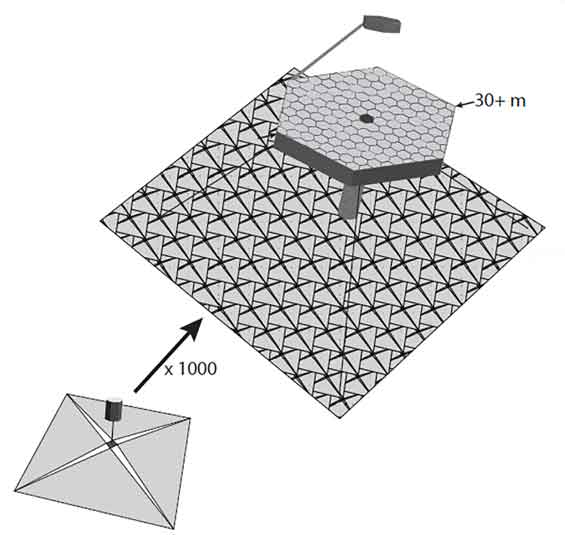
- We propose a modular, self-assembling architecture enabling the construction of 30+ m diameter, reflective, space telescopes with active optics.
- The entire structure of the telescope, including the primary and secondary mirrors, secondary support structure and planar sunshield will be constructed from a single, mass-produced spacecraft module.
- Each module will be composed of a hexagonal ~1 m diameter spacecraft topped with an edge-to-edge, active mirror assembly.
- The mirror will have at least thirty degrees of freedom, driven by mechanical actuators, so that the assembled primary and secondary mirrors will be fully active and can be phased and given the appropriate shape post-assembly.
- Modules will be launched independently as payloads of opportunity, and navigate to the Sun-Earth L2 point using a deployable solar sail.
- The solar sails will then become the planar telescope sunshield during telescope assembly, which will proceed autonomously with no additional human or robotic intervention.
- The target mission concept is a large-aperture implementation of the Large Ultraviolet/Optical/Infrared Surveyor (LUVOIR), which has been highlighted in the NASA Astrophysics roadmap and is currently being studied for the 2020 decadal survey.
- In the NIAC Phase I, we propose to carry out detailed simulations of the spacecraft flight and rendezvous dynamics in order to set requirements on the solar sail area and loading, along with analyses of the mirror assembly to validate the ability to achieve the required surface figure in the assembled primary and secondary mirrors.
- This proposal is directly in line with the priorities of the NASA Technology Roadmaps in Science Instruments, Observatories, and Sensor Systems and Robotics and Autonomous Systems.
- This architecture provides a credible path to the construction of a giant space telescope, which would be infeasible using the design and assembly techniques employed for previous generations of space telescopes including Hubble and James Webb.
- A space-based aperture of this scale would enable transformative and unprecedented science, including mapping the distribution of surface cover on Earth-like planets, resolved imaging of stellar populations over a span of 10 billion years, dark energy/dark matter searches, and much more.
- The demonstration of on-orbit autonomous assembly will also be directly applicable to a host of other NASA missions and of value to the broader aerospace community.
Astrophysics and Technical Study of a Solar Neutrino Spacecraft
Nickolas Solomey, Wichita State University, Kansas
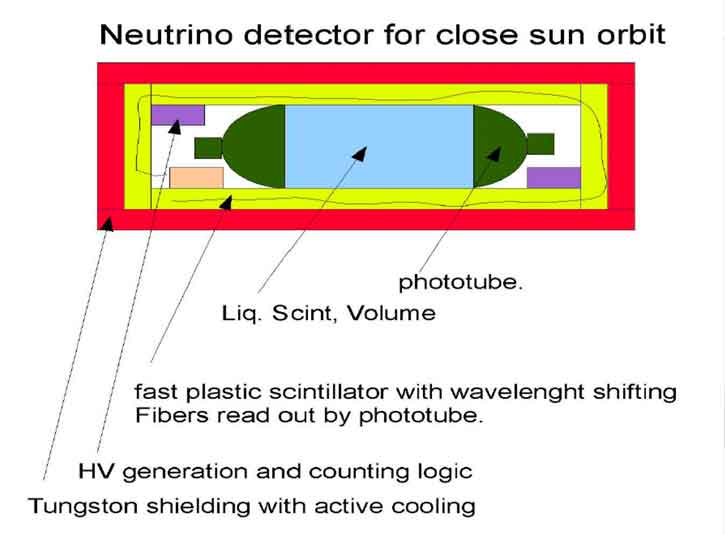
- Both spacecraft and detector technology capable of operating close to the Sun would be achieved through this proposed NIAC project.
- This technology is needed to study our Sun’s solar interior for the purpose of better understanding our Sun, its future expected changes such as long term forecasting of solar energy output, as well as understanding fundamental physics such as nuclear fusion reaction rates, Dark Matter searches, Particle Physics Neutrino Oscillations and Nuclear Physics Matter effects of Neutrino interaction.
- On the Earth the solar intensity of neutrinos is very low, but by going very close to the Sun in a close solar orbit of seven solar Radii the neutrino rate can be 1,000 times higher.
- In this NIAC project a small detector inside the de-coherence neutrino radius would be evaluated to explore its science potential for studying the interior nuclear reactions of the Sun.
- Unlike light from the Sun, which comes from the same Nuclear fusion reactions inside the nuclear furnace core but that take energy 50,000 to 100,000 years to reach the surface, neutrinos, which weakly interact, with matter, come directly out of the solar core very quickly and they will tell us much more about the current solar interior than measuring any other particle emitted from the Sun.
- This proposed new NIAC concept comes with some challenges for both the spacecraft and detector design.
- First, current neutrino technologies are limited and large detectors are needed to make a small number of measurements.
- Also, all current neutrino detection technology options are Earth-based and have never flown in space.
- NASA has managed to do new science by using a simple technology such as the EGRET spark-chamber satellite flown in 1992.
- Once NASA put this satellite into an orbit high above the Earth, a new window into the universe of high-energy gamma rays was opened for scientific study.
- By advancing and developing neutrino detector technology which will fly and operate in outer space, a novel opportunity to study the Sun will be created, one that will enhance our ability to predict both long-term Solar output and Solar storms as well as to perform fundamentally new science studies that are currently unattainable.
- Wichita State University proposes this joint project involving NASA’s Marshall Space Flight Center (MSFC) Astrophysics Center leader and the Advanced Concepts Engineering office along with South Dakota State University.
- The proposed NIAC project will enable an initial evaluation of technological challenges through simulations addressing the aspects of background event rejection, shielding and various possible options for neutrino signal identification.
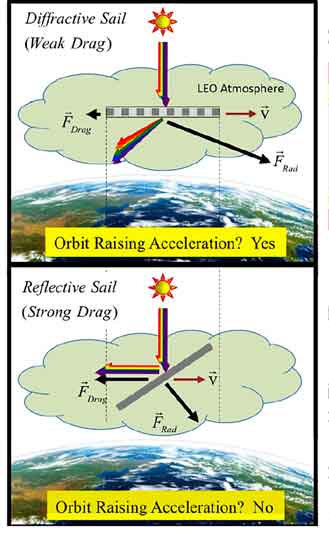
Advanced Diffractive MetaFilm Sailcraft
Grover Swartzlander, Rochester Institute of Technology, New York
- The abundant untapped momentum of solar photons is becoming increasingly attractive as a means to propel spacecraft with an attached solar sail.
- Decades of theoretical mission studies have examined how microscopically thin films ranging from meters to kilometers in extent may make use of freely available sunlight for near-Earth, interplanetary, and interstellar space travel.
- In nearly all cases a reflective metal-coated film was the presumed mechanism for photon-to-sail momentum transfer.
- Here we describe an attractive and innovative alternative that makes use of the recently matured design and fabrication of meta-materials: Diffractive Sails.
- Advances in the design and fabrication of broadband high-efficiency single diffraction order gratings and active electro-optic control schemes may make diffractive sails superior to reflective sails for orbit raising or lowering, station keeping, and other mission types.
- The proposed new aerospace architecture could, for example, provide a low cost and efficient means for raising hundreds of LEO CubeSats and other satellites to higher orbits.
- Such satellites are becoming of great US importance for science, security, and commercial purposes.
- Experiments, numerical modeling, and roadmap development are proposed.
- The project will explore the superior radiation pressure force combined with a significant reduction in atmospheric drag in LEO for a diffractive sail compared to a reflective one.
- The potential to raise (as well as de-orbit or station keep) hundreds of CubeSats from low-cost very-low Earth orbit would be a recognized game changer that would build enthusiasm and advocacy amongst the growing small satellite community of students, entrepreneurs, and aerospace scientists and engineers.
- Diffractive films provide an innovative approach that will widely affect future solar and laser driven sailing.
- This proposal represents the first step toward those innovations, raising the TRL from 1 to 3.
Spectrally-Resolved Synthetic Imaging Interferometer
Jordan Wachs, Ball Aerospace & Technologies Corporation, Boulder, Colorado
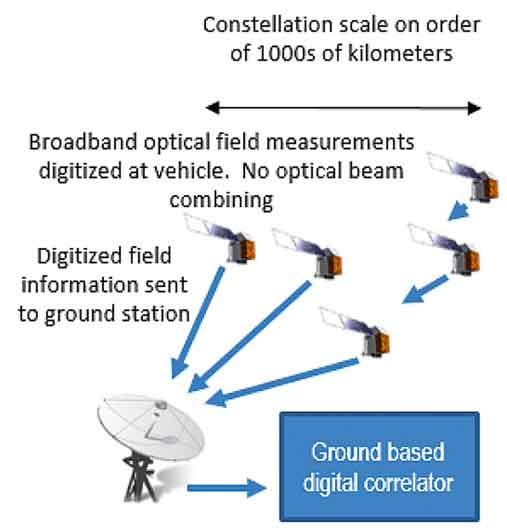
- A new architecture for spectrally resolved long baseline interferometry is presented. Utilization of a frequency comb reference allows coherent detection and digitization of the optical field within the full spectrum of the frequency comb.
- The broadband, coherent nature of the frequency comb allows narrow frequency channels to be down-converted to and measured at RF frequencies, and coherently added in the digital domain – resulting in an SNR that is comparable to that of traditional direct detection interferometers, but without the need for nanometer scale optical path length control for beam combination purposes or the Terabit/sec data rates necessary for sampling the optical field directly.
- Spectral sensitivity of the system allows radial velocimetry measurements sensitive to redshift on the order of several Hz, which is sufficient to resolve relative velocity change on the order of mm/sec.
- Direct spectroscopic measurements with this system will be sensitive enough to detect the presence water, methane, and other compounds with absorption features within the frequency comb spectrum.
- Due to the nature of this broadband coherent detection scheme, all spectral information is inherently present in all measured data, allowing simultaneous imaging, velocimetry, and spectroscopy measurements.
- This paradigm shifting technology will provide extreme spatial resolution as well as direct spectroscopic and radial velocimetry measurements without the need for THz processing or nanometer class positional stability and control.
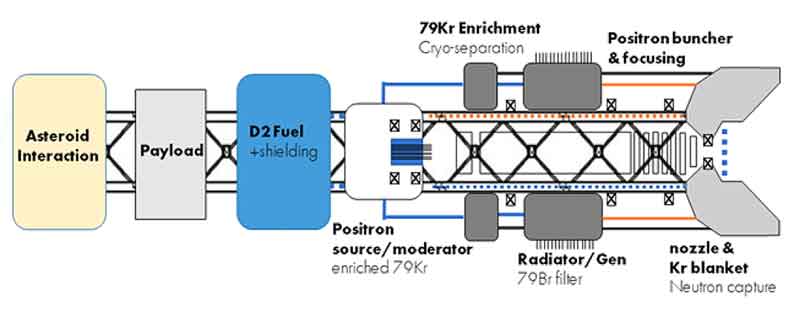
Radioisotope Positron Propulsion
Ryan Weed, Positron Dynamics, Livermore, California
- Current state of the art in-space propulsion systems based on chemical or ion propellants fail to meet requirements of 21st century space missions.
- Antimatter is a candidate mechanism for a propulsion system that could transport humans and/or robotic systems with drastically reduced transit times, providing quicker scientific results, increasing the payload mass to allow more capable instruments and larger crews, and reducing the overall mission cost.
- Unfortunately, previous propulsion concepts relied on unrealistic amounts of trapped antimatter – orders of magnitude away from any near-term capability.
- The goal of this effort is to determine the feasibility of a (TRL 1-2) radioisotope positron catalyzed fusion propulsion concept that does not rely on trapped antimatter.
- Such a transformative technology inspires and drives further innovation within the aerospace community and can be applied to a relevant mission – the bulk retrieval of an entire asteroid into translunar space – a mission of great scientific and commercial interest (e.g. asteroid mining).
- The idea of harnessing resources from asteroids goes back more than a century to Tsiolkovsky.
- Fundamentally, for asteroid mining to become financially viable, the cost of the retrieval spacecraft must be less than the value gained from the asteroid.
- Therefore, developing technology (e.g. efficient propulsion systems) that decreases the mass and complexity of the retrieval spacecraft must be a priority.

“The 2018 Phase I competition was especially fierce, with over 230 proposals and only 25 winners,” said Jason Derleth, NIAC program executive. “I can’t wait to see what the new NIAC Fellows can do for NASA!”
Phase II studies allow awardees time to refine their designs and explore aspects of implementing the new technology.
This year’s Phase II portfolio addresses a range of leading-edge concepts, including a breakthrough propulsion architecture for interstellar precursor missions, a large scale space telescope, novel exploration tools for Triton, and Mach effect gravity assist drive propulsion.
Awards under Phase II of the NIAC program can be worth as much as $500,000 for two-year studies, and allow proposers to further develop Phase I concepts that successfully demonstrated initial feasibility and benefit.
The selected 2018 Phase II proposals are:
Pulsed Fission-Fusion (PuFF) Propulsion Concept
Robert Adams, NASA’s Marshall Space Flight Center, Huntsville, Alabama
A Breakthrough Propulsion Architecture for Interstellar Precursor Missions
John Brophy, JPL
Kilometer Space Telescope (KST)
Devon Crowe, Raytheon, El Segundo, California
Dismantling Rubble Pile Asteroids with AoES (Area-of-Effect Soft-bots)
Jay McMahon, University of Colorado, Boulder
Triton Hopper: Exploring Neptune’s Captured Kuiper Belt Object
Steven Oleson, NASA’s Glenn Research Center, Cleveland
Spacecraft Scale Magnetospheric Protection from Galactic Cosmic Radiation
John Slough, MSNW, LLC, Redmond, Washington
Direct Multipixel Imaging and Spectroscopy of an Exoplanet with a Solar Gravity Lens Mission
Slava Turyshev, JPL
NIMPH: Nano Icy Moons Propellant Harvester
Michael VanWoerkom, ExoTerra Resource, Littleton, Colorado
Mach Effect for in space propulsion: Interstellar mission
James Woodward, Space Studies Institute, Inc., Mojave, California
“Phase II studies are given to the most successful Phase I fellows, whose ideas have the best possibility of changing the possible,” said Derleth.
“Their two-year timeframe and larger budget allow them to really get going on the business of creating the future.”
NASA selected these projects through a peer-review process that evaluated innovativeness and technical viability.
All projects are still in the early stages of development, most requiring 10 or more years of concept maturation and technology development before use on a NASA mission.
NIAC partners with forward-thinking scientists, engineers and citizen inventors from across the nation to help maintain America’s leadership in air and space.
NIAC is funded by NASA’s Space Technology Mission Directorate, which is responsible for developing the cross-cutting, pioneering new technologies and capabilities needed by the agency to achieve its current and future missions.

For more information about NIAC, and a complete list of the selected proposals, visit:
For more information about NASA’s investments in space technology, visit:




{kind=link}